JUNE 3, 2024 by Beijing Institute of Technology Press Co.
Collected at : https://techxplore.com/news/2024-06-surveillance-robot-patients-limb-weakness.html
A team of researchers from Huazhong University of Science and Technology has introduced an innovative human-following surveillance robot designed to assist individuals with lower limb muscle weakness, a condition prevalent among the elderly and those suffering from neurological and motor system diseases. This cutting-edge technology promises to enhance daily mobility and accelerate recovery, offering a significant boost to rehabilitation efforts.
The paper is published in the journal Cyborg and Bionic Systems.
The development of the surveillance robot, detailed in a recent study published by Meiping Zhang and colleagues, addresses critical gaps in current rehabilitation technology by focusing on continuous and accurate intention recognition and effective robot following during the rehabilitation process. With an increasing global elderly population, the need for such advanced solutions has become more pressing, with an estimated 400 million elderly worldwide affected by muscle loss.
With an aging global population, the prevalence of lower limb muscle weakness is on the rise, affecting an estimated 400 million elderly people worldwide. This condition, often resulting from neurological and motor system diseases, significantly impairs mobility and independence.
Timely and effective rehabilitation interventions are crucial for recovery and reintegration into society. Assistive robots, which have been increasingly researched, offer a promising solution to reduce the burden on health care systems and enhance patient independence.
The robot utilizes a novel human walking intention estimation algorithm based on set-membership filtering with incomplete observation, which allows it to maintain effective support even when motion signals are interrupted, such as through data transmission blockages or body occlusion. This is crucial for ensuring that the robot can continuously adapt to the user’s pace and intended path, providing support exactly when and where it is needed.
In addition to its advanced intention recognition capabilities, the robot employs a human-following control algorithm that ensures it remains within a prescribed distance and orientation relative to the user. This not only facilitates uninterrupted support but also prevents the robot from obstructing the user’s path, thereby enhancing the user’s comfort and safety during use.
The research team’s experiments have demonstrated the effectiveness of these technologies. The robot successfully navigated complex walking paths while maintaining a close yet safe distance to the user, adjusting its movement in real-time based on the user’s walking intentions and environmental conditions.
“Our robot not only provides physical support but also integrates advanced algorithms to ensure it can adapt to various user needs and environments,” said Jian Huang, the senior author of the study. “It represents a significant step forward in assistive technology for rehabilitation, offering potential applications in other areas such as logistics, domestic assistance, and even recreational activities.”
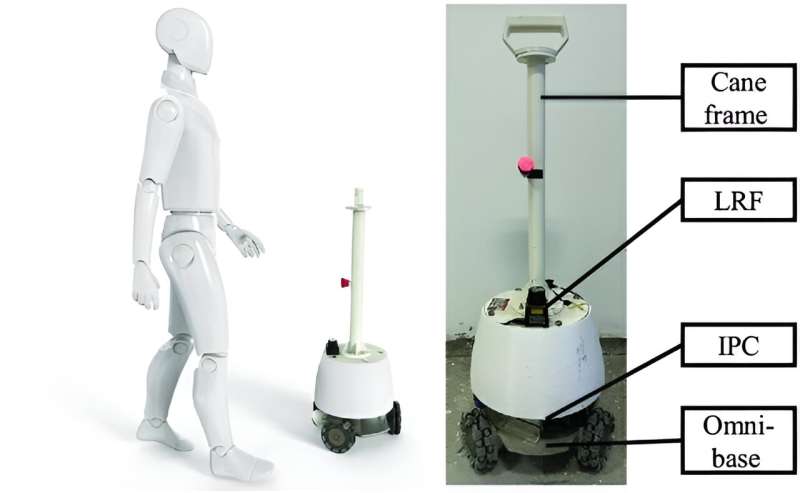
The technology developed by Zhang and her team is particularly suited for patients in the early stages of muscle strength decline, who can walk independently but need monitoring to prevent falls. The robot’s design includes easy-to-move parts, a human–robot interaction interface, and a handrail for balance support, all crucial for enhancing the user’s mobility and quality of life.
The researchers are optimistic about the future enhancements of this technology, including the integration of more advanced sensors and algorithms to further improve the robot’s responsiveness and applicability in diverse environments. The ultimate goal is to create robots that not only support mobility but also actively contribute to the rehabilitation process by enhancing muscle function and coordination.
More information: Meiping Zhang et al, Prescribed Performance Control of a Human-Following Surveillance Robot with Incomplete Observation, Cyborg and Bionic Systems (2023). DOI: 10.34133/cbsystems.0085
Journal information: Cyborg and Bionic Systems
Leave a Reply