Jack Loughran Mon 25 Nov 2024
Collected at: https://eandt.theiet.org/2024/11/25/nasa-developing-miniature-autonomous-underwater-robots-study-jupiters-icy-moon
Nasa is developing swarms of smartphone-sized underwater robots designed to explore the oceans of other planets in our Solar System.
The Europa Clipper, which was launched last month, is a space probe with a mission to study Europa, a Galilean moon of Jupiter. Once it reaches its destination in 2030, the spacecraft will prepare to aim its science instruments towards the surface of Europa during 49 flybys, looking for signs that the ocean beneath the moon’s icy crust could sustain life.
Nasa is now developing an ocean-exploration mission concept called SWIM (Sensing With Independent Micro-swimmers), which envisions sending dozens of self-propelled robots under the surface in a bid to carry out exploration in areas that traditional rovers would be incapable of searching. Once delivered to their destination, an ice-melting cryobot would help to create a hole, allowing them to burrow under the icy surface.
“People might ask, why is Nasa developing an underwater robot for space exploration?” said Ethan Schaler, principal investigator for SWIM. “It’s because there are places we want to go in the Solar System to look for life, and we think life needs water. So we need robots that can explore those environments autonomously, hundreds of millions of miles from home.”
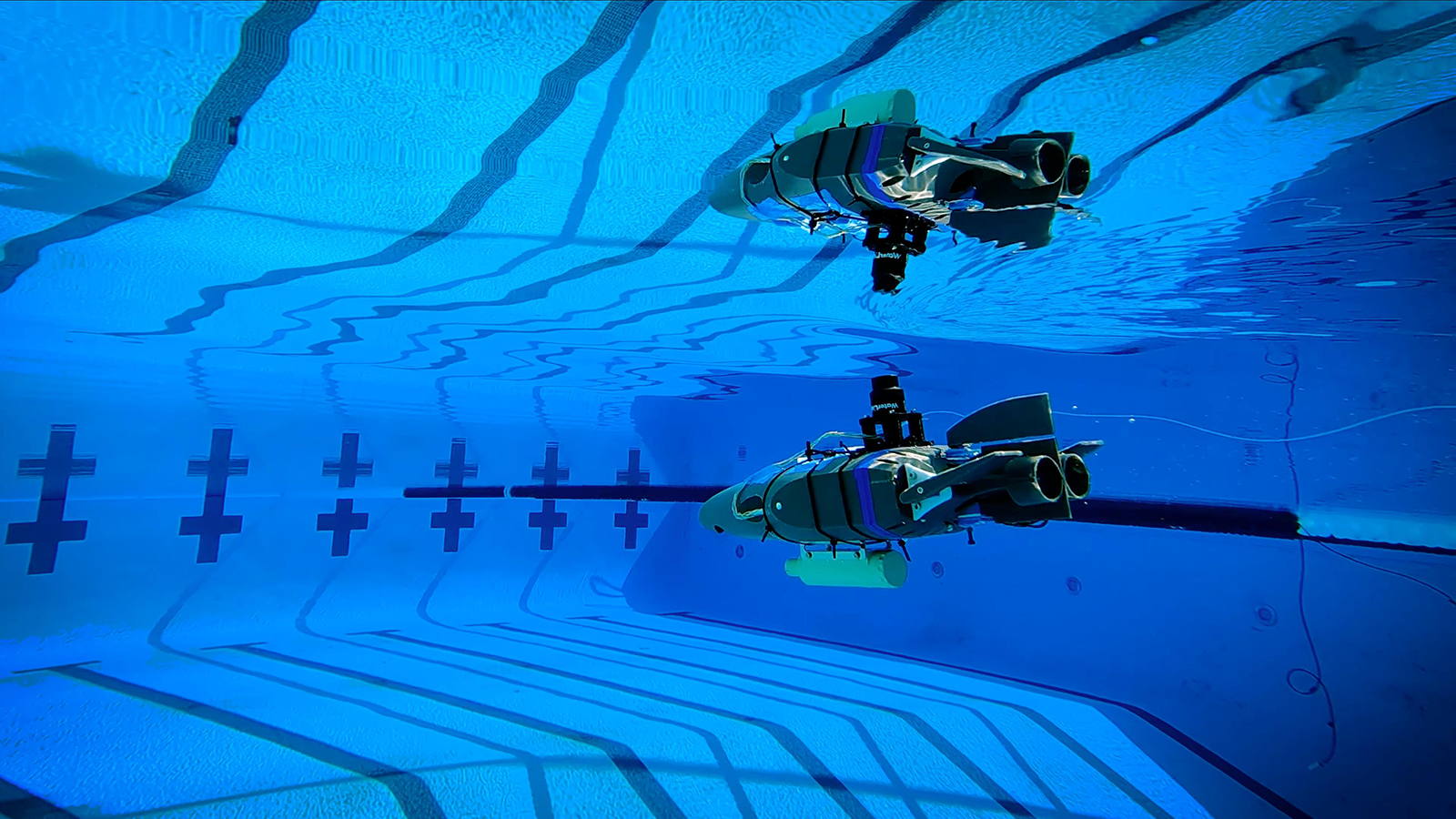
A series of prototypes are currently undergoing testing in a 23m swimming pool. The latest iteration is a 3D-printed plastic device that relies on low-cost, commercially made motors and electronics. Pushed along by two propellers, with four flaps for steering, the prototype demonstrated controlled manoeuvring, the ability to stay on and correct its course, and a back-and-forth ‘lawnmower’ exploration pattern. It managed to carry out its operations autonomously, without the team’s direct intervention. The team completed more than 20 rounds of testing various prototypes at the pool.
“It’s awesome to build a robot from scratch and see it successfully operate in a relevant environment,” Schaler said. “Underwater robots in general are very hard, and this is just the first in a series of designs we’d have to work through to prepare for a trip to an ocean world. But it’s proof that we can build these robots with the necessary capabilities and begin to understand what challenges they would face on a subsurface mission.”
The wedge-shaped prototype used in most of the pool tests was only around 42cm long, weighing 2.3kg. As conceived for spaceflight, the robots would have dimensions about three times smaller and would feature miniaturised, purpose-built parts alongside a wireless underwater acoustic communication system for transmitting data and triangulating their positions.
In addition, a team of collaborators at Georgia Tech in Atlanta fabricated and tested an ocean composition sensor that would enable each robot to simultaneously measure temperature, pressure, acidity or alkalinity, conductivity and chemical makeup. At just a few millimetres square, the chip is the first to combine all those sensors into one tiny package.
Leave a Reply