October 22, 2024 by Aerospace Information Research Institute, Chinese Academy of Sciences
Collected at: https://techxplore.com/news/2024-10-advanced-error-urban-vehicle-accuracy.html
In an advance for vehicle navigation, researchers have developed an advanced system that integrates Global Navigation Satellite Systems (GNSS), Inertial Measurement Units (IMU), and Light Detection and Ranging (LiDAR) Odometry (LO). This novel approach addresses key challenges in urban navigation, offering a substantial boost in positioning accuracy and reliability, particularly in densely built environments where navigation systems typically falter.
Accurate positioning is fundamental to the evolution of Intelligent Transportation Systems (ITS). However, in urban areas, Global Navigation Satellite Systems (GNSS) and Inertial Measurement Units (IMU) performance is often compromised by obstructed or distorted signals from surrounding infrastructure. These limitations highlight the urgent need for more robust error modeling and sensor integration. Overcoming these challenges is crucial for the development of next-generation ITS solutions.
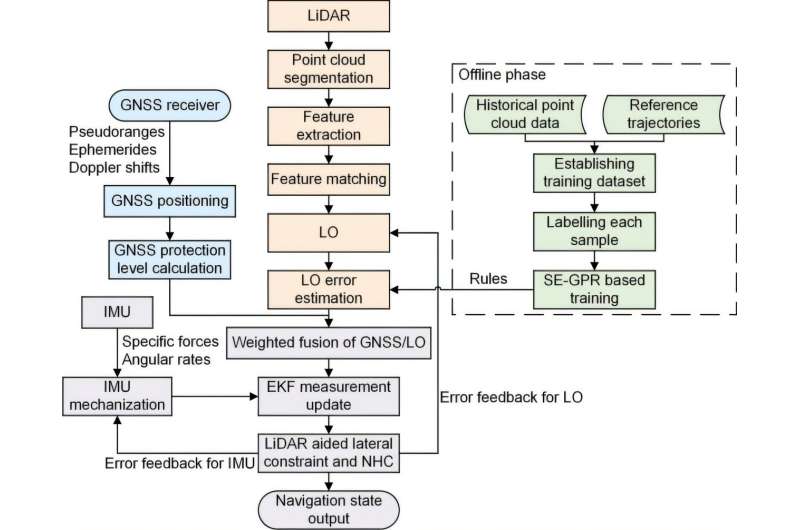
On October 7, 2024, researchers from Nanjing University of Aeronautics and Astronautics, alongside partners from Hong Kong and the UK, published their findings in Satellite Navigation. Their study introduces an enhanced GNSS/IMU/LO (Light Detection and Ranging (LiDAR) Odometry, LO) integration system, featuring a novel LO error model and lateral constraint, which significantly improves urban navigation accuracy. This system builds on existing technologies, providing more precise vehicle positioning in complex urban settings.
. DOI: 10.1186/s43020-024-00151-8")
At the heart of the research is a new Squared Exponential Gaussian Process Regression (SE-GPR) model, which accurately predicts real-time LO errors based on vehicle velocity and point cloud features. By weighting GNSS and LO data, the system dynamically adjusts positioning calculations, ensuring greater reliability in environments with poor GNSS signal coverage. Additionally, a LiDAR-Aided Lateral Constraint (LALC) helps reduce error accumulation. Tests showed a 35.9% improvement in horizontal accuracy and a 50% boost in 3D positioning, underscoring the system’s effectiveness.
Lead author Dr. Tong Yin explained, “This research showcases how the integration of a cutting-edge error model with traditional GNSS and IMU systems leads to remarkable improvements in urban navigation. Our weighted data fusion approach enables more reliable positioning in areas where conventional systems fall short, paving the way for smarter transport solutions.”
This breakthrough holds promise for various urban transport applications, especially in autonomous vehicles and logistics, where precise navigation is critical. The system could enhance both safety and operational efficiency in smart cities. Future research aims to further optimize the model for dynamic environments and lower the computational demands for real-time use.
More information: Hanzhi Chen et al, GNSS/IMU/LO integration with a new LO error model and lateral constraint for navigation in urban areas, Satellite Navigation (2024). DOI: 10.1186/s43020-024-00151-8
Leave a Reply