By University of Maryland July 23, 2024
Collected at: https://scitechdaily.com/mimicking-the-human-eye-researchers-revolutionize-robotic-cameras/
New camera mimics the involuntary movements of the human eye to create sharper, more accurate images for robots, smartphones, and other image-capturing devices.
Computer scientists have invented a camera mechanism that improves how robots see and react to the world around them. Inspired by how the human eye works, the research team, led by the University of Maryland, developed an innovative camera system that mimics the tiny involuntary movements used by the eye to maintain clear and stable vision over time. The team’s prototyping and testing of the camera—called the Artificial Microsaccade-Enhanced Event Camera (AMI-EV)—was detailed in a paper that was recently published in the journal Science Robotics.
Advancements in Event Camera Technology
“Event cameras are a relatively new technology better at tracking moving objects than traditional cameras, but today’s event cameras struggle to capture sharp, blur-free images when there’s a lot of motion involved,” said the paper’s lead author Botao He, a computer science Ph.D. student at UMD. “It’s a big problem because robots and many other technologies—such as self-driving cars—rely on accurate and timely images to react correctly to a changing environment. So, we asked ourselves: How do humans and animals make sure their vision stays focused on a moving object?”
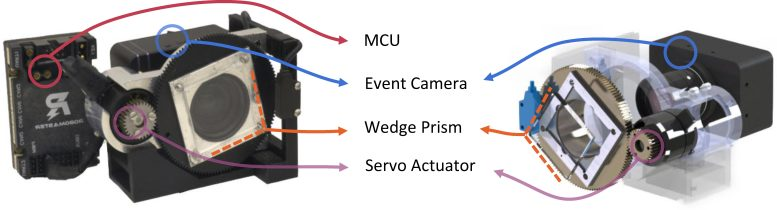
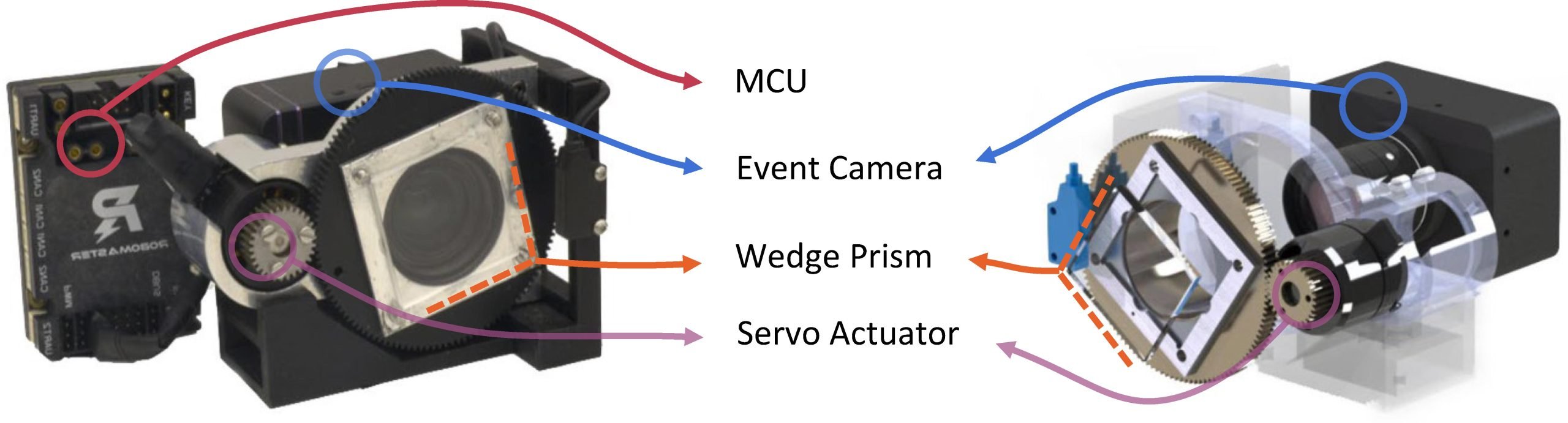
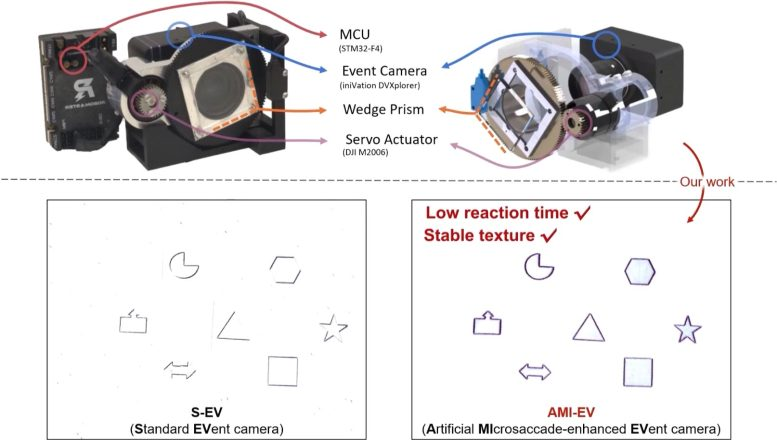
Depiction of novel event camera system versus standard event camera system. Credit: Botao He, Yiannis Aloimonos, Cornelia Fermuller, Jingxi Chen, Chahat Deep Singh
{kind=link}
Mimicking Human Eye Movements
For He’s team, the answer was microsaccades, small and quick eye movements that involuntarily occur when a person tries to focus their view. Through these minute yet continuous movements, the human eye can keep focus on an object and its visual textures—such as color, depth, and shadowing—accurately over time.
“We figured that just like how our eyes need those tiny movements to stay focused, a camera could use a similar principle to capture clear and accurate images without motion-caused blurring,” He said.
Technological Implementation and Testing
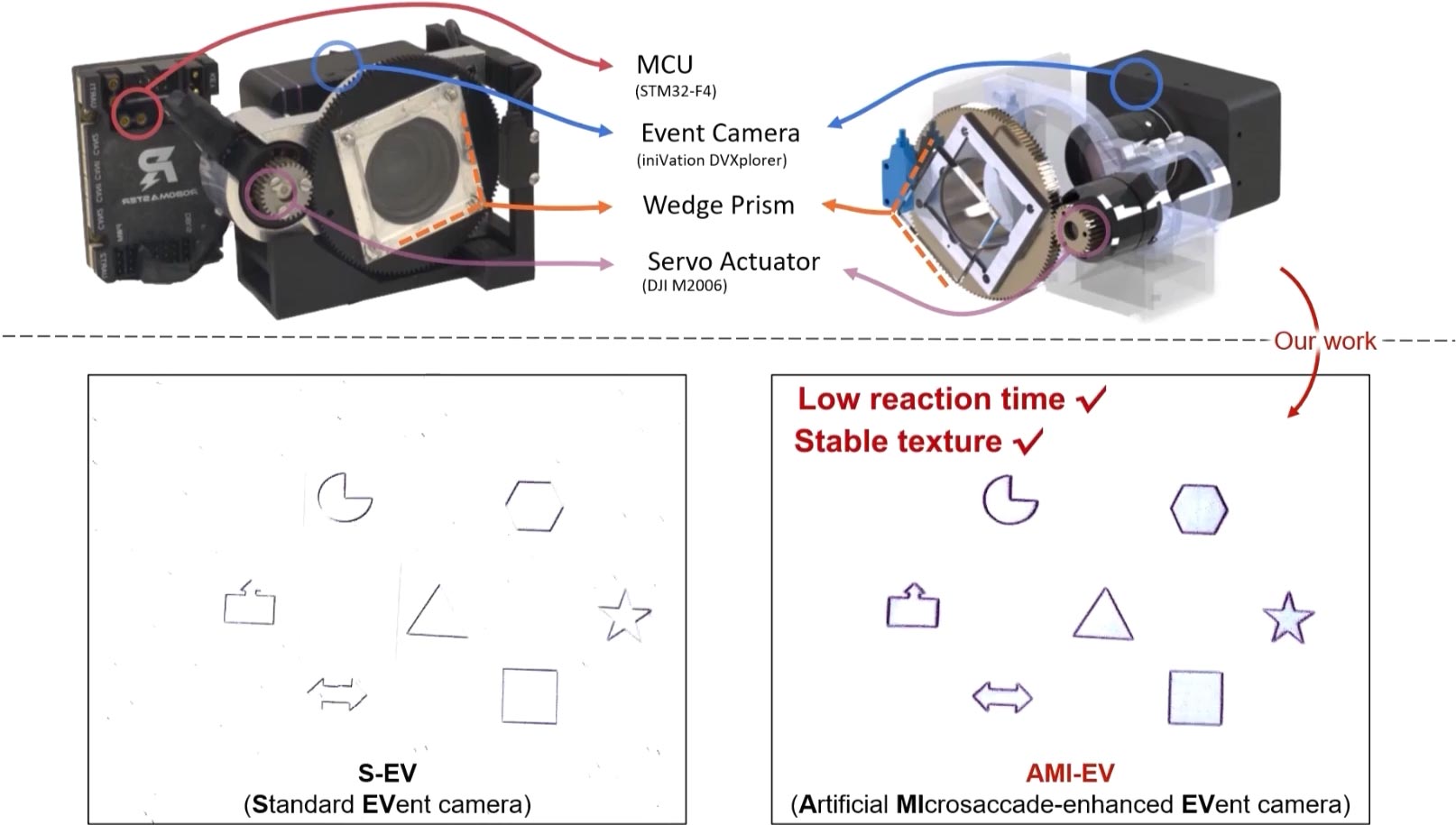
The team successfully replicated microsaccades by inserting a rotating prism inside the AMI-EV to redirect light beams captured by the lens. The continuous rotational movement of the prism simulated the movements naturally occurring within a human eye, allowing the camera to stabilize the textures of a recorded object just as a human would. The team then developed software to compensate for the prism’s movement within the AMI-EV to consolidate stable images from the shifting lights.
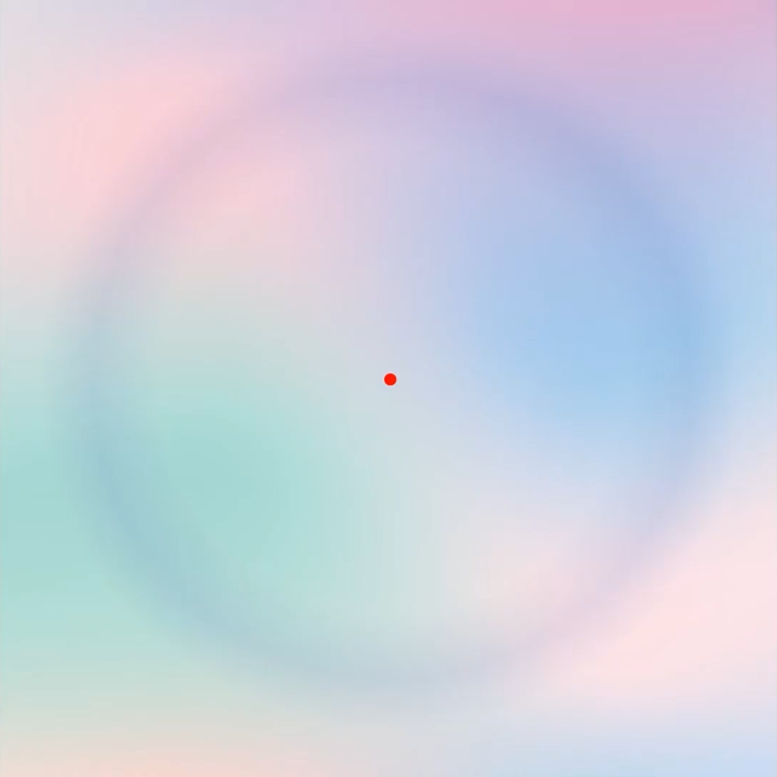
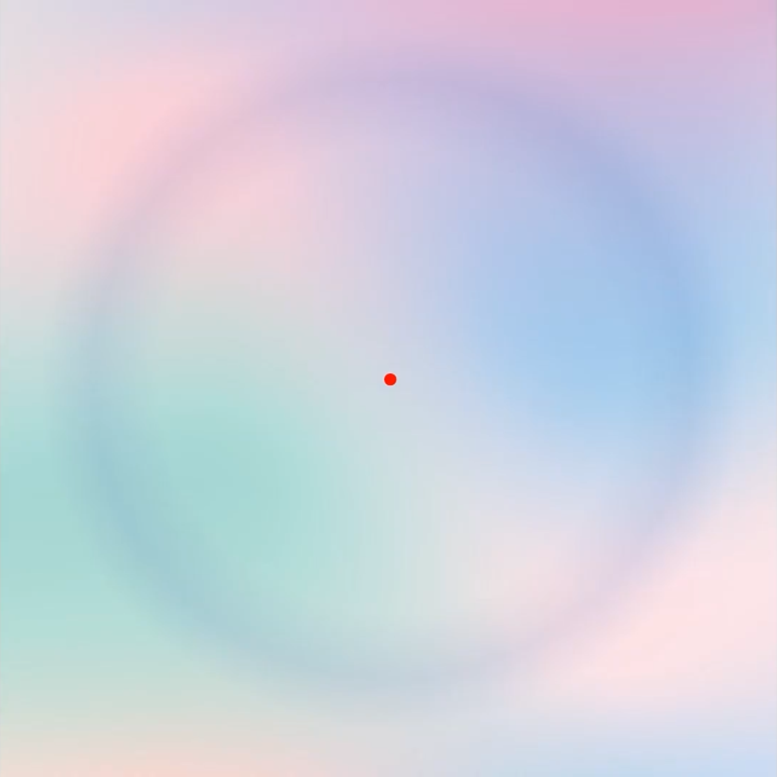
A demonstration of how microsaccades counteract visual fading. After a few seconds of fixation (staring) on the red spot in this static image, the background details of this image begin to visually fade. This is because microsaccades have been suppressed during this time and the eye cannot provide effective visual stimulation to prevent peripheral fading. Credit: UMIACS Computer Vision Laboratory
{kind=link}
Study co-author Yiannis Aloimonos, a professor of computer science at UMD, views the team’s invention as a big step forward in the realm of robotic vision.
“Our eyes take pictures of the world around us and those pictures are sent to our brain, where the images are analyzed. Perception happens through that process and that’s how we understand the world,” explained Aloimonos, who is also director of the Computer Vision Laboratory at the University of Maryland Institute for Advanced Computer Studies (UMIACS). “When you’re working with robots, replace the eyes with a camera and the brain with a computer. Better cameras mean better perception and reactions for robots.”
Potential Impact on Various Industries
The researchers also believe that their innovation could have significant implications beyond robotics and national defense. Scientists working in industries that rely on accurate image capture and shape detection are constantly looking for ways to improve their cameras—and AMI-EV could be the key solution to many of the problems they face.
“With their unique features, event sensors and AMI-EV are poised to take center stage in the realm of smart wearables,” said research scientist Cornelia Fermüller, senior author of the paper. “They have distinct advantages over classical cameras—such as superior performance in extreme lighting conditions, low latency, and low power consumption. These features are ideal for virtual reality applications, for example, where a seamless experience and the rapid computations of head and body movements are necessary.”
Depiction of novel event camera system versus standard event camera system. Credit: Botao He, Yiannis Aloimonos, Cornelia Fermuller, Jingxi Chen, Chahat Deep Singh
{kind=link}
Enhancements in Real-Time Image Processing
In early testing, AMI-EV was able to capture and display movement accurately in a variety of contexts, including human pulse detection and rapidly moving shape identification. The researchers also found that AMI-EV could capture motion in tens of thousands of frames per second, outperforming most typically available commercial cameras, which capture 30 to 1000 frames per second on average. This smoother and more realistic depiction of motion could prove to be pivotal in anything from creating more immersive augmented reality experiences and better security monitoring to improving how astronomers capture images in space.
Conclusion and Future Outlook
“Our novel camera system can solve many specific problems, like helping a self-driving car figure out what on the road is a human and what isn’t,” Aloimonos said. “As a result, it has many applications that much of the general public already interacts with, like autonomous driving systems or even smartphone cameras. We believe that our novel camera system is paving the way for more advanced and capable systems to come.”
Reference: “Microsaccade-inspired event camera for robotics” by Botao He, Ze Wang, Yuan Zhou, Jingxi Chen, Chahat Deep Singh, Haojia Li, Yuman Gao, Shaojie Shen, Kaiwei Wang, Yanjun Cao, Chao Xu, Yiannis Aloimonos, Fei Gao and Cornelia Fermüller, 29 May 2024, Science Robotics.
DOI: 10.1126/scirobotics.adj8124
In addition to He, Aloimonos, and Fermüller, other UMD co-authors include Jingxi Chen (B.S. ’20, computer science; M.S. ’22, computer science) and Chahat Deep Singh (M.E. ’18, robotics; Ph.D. ’23, computer science).
This research is supported by the U.S. National Science Foundation (Award No. 2020624) and National Natural Science Foundation of China (Grant Nos. 62322314 and 62088101). This article does not necessarily reflect the views of these organizations.
Leave a Reply