September 28, 2024 by Tejasri Gururaj , Tech Xplore
Collected at: https://techxplore.com/news/2024-09-turing-patterns-soft-pneumatic-technology.html
According to a recent study in Scientific Reports, Turing patterns can be used to develop a new method for designing and producing fabric-based soft pneumatic actuators (FSPAs).
Fabric-based soft pneumatic actuators (FSPAs) are flexible, soft devices that can deform or move when pressure is exerted on them. They function by inflating or deflating, which makes the fabric bend, stretch, or twist.
Soft robotics often relies on FSPAs because of their crucial flexibility and adaptability. Unlike traditional rigid robotic parts, FSPAs can interact safely with humans and delicate objects.
Thanks to their soft and lightweight nature, FSPAs are highly suitable for applications such as wearable devices, adaptive shelters, robotic grippers, and assistive devices. Their value lies in their low cost, safety, and flexibility.
However, designing and fabricating FSPAs is challenging. The challenge was addressed by the research team through the automation of the process.
The team consisted of Dr. Masato Tanaka and Dr. Tsuyoshi Nomura from Toyota Central R&D Labs., Inc. in Japan and Dr. Yuyang Song from Toyota Motor Engineering & Manufacturing North America, Inc. in the US.
Phys.org spoke to the researchers who shared their motivation for pursuing this research.
“The motivation behind this research stems from the recognized need in the soft robotics community for pneumatic actuators that can perform controlled movements using simple mechanisms without relying on specialized materials or technologies,” said Dr. Tanaka.
Turing patterns
“Our goal was to develop simple, low-cost FSPAs that achieve shape-morphing capabilities. We specifically focused on incorporating Alan Turing’s morphogenesis theory, known as Turing patterns, into the design process of these surface textures,” said Dr. Nomura.
Alan Turing put forth his theory of morphogenesis in 1952, describing how patterns in nature (stripes, spirals, etc) can arise from a uniformly distributed state.
“Inspired by Alan Turing’s work where the Turing pattern can be derived from isotropic reaction-diffusion equations, we employed a gradient-based orientation optimization method to design the surface membrane of FSPAs,” said Dr. Song.
Turing patterns result from systems that have reaction and diffusion components. The main idea is that we have two interacting substances, one of which promotes the promotion of both, and the second suppresses or inhibits the first one.
The result of this feedback loop is the formation of stable, repeating patterns, or Turing patterns, like the stripes seen on zebras and tigers.
Trial and error
The biggest challenge with designing FSPAs is the need for trial and error to find the right material.
“Traditional pneumatic structures typically use isotropic materials with specific geometric features, such as stitch lines, to achieve shape morphing,” explained Dr. Tanaka.
Soft isotropic materials, known for their uniform properties, are commonly used in traditional FSPAs. This guarantees that the material inflates or bends uniformly when pressure is applied.Play
However, designing and fabricating a material that deforms in a controlled and predictable way requires trial and error, and can be time-consuming. The research team’s objective was to bypass these limitations through process automation and optimization, resulting in more advanced and controlled movements in soft robotic applications.
“We employ a gradient-based orientation optimization method to design the surface membrane of these structures. This method assumes the use of anisotropic materials on membranes, where the orientation can vary freely, making the fabrication of such structures a significant challenge,” said Dr. Song.
“Our research addresses this challenge by utilizing Turing patterns to bridge the gap between material orientation-based optimization design and 3D printing,” added Dr. Nomura.
Automating the process
FSPAs consist of the material, which is the fabric used to construct the actuator and the actuator, which performs the movement in response to pressure.
The first step of their method was to optimize the orientation of the material—that is, how the fibers of the flexible fabric are arranged on the surface of the actuator.
For this, they used the nonlinear finite element method. Following optimization, the orientation layout was converted into particular patterns on the material.
These specific patterns were generated from a mathematical model of anisotropic reaction-diffusion systems used by the researchers. This pattern fills the entire surface and ensures that the material deforms in the desired way.
“By solving these equations and incorporating information about the distribution of optimized material anisotropy, we generated anisotropic Turing pattern textures corresponding to the original material anisotropy,” explained Dr. Tanaka.
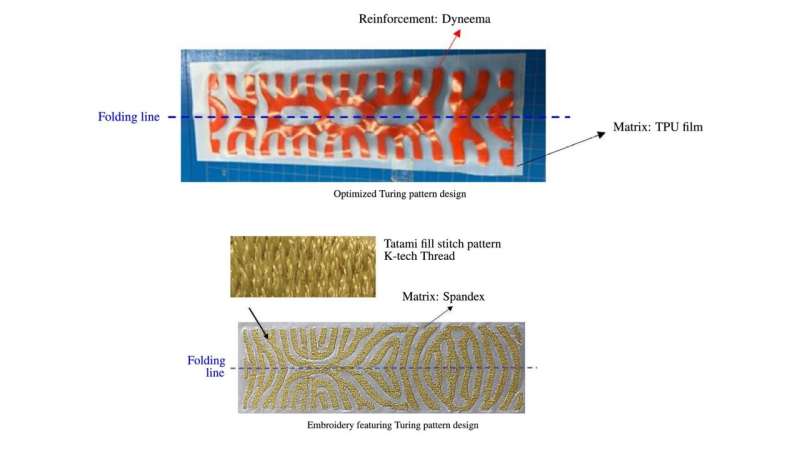
To fabricate the FSPA, the researchers explored two methods: heat bonding and embroidery.
In heat bonding, a rigid fabric such as Dyneema is laser-cut into the required Turing pattern and then adhered to a softer fabric like TPU film using a heat press. In contrast, the embroidery technique embeds the Turing pattern into soft fabric with stiff thread, resulting in regions of different stiffness that allow for controlled movement.
“These fabrication methods demonstrated, offer scalable and cost-effective production possibilities for these advanced actuators,” explained Dr. Song.
Comparing with the classics
The research team compared their designs to classical simple designs, with their Turing pattern designs showing comparable and better performance.
For C-shaped designs, the Turing pattern proved more effective than classical designs, decreasing the distance between the actuator edges by roughly 10%.
For twisting movements, the Turing pattern designs performed similarly to classical designs. However, S-shaped bending is traditionally difficult to achieve.
“Our method can achieve any motion with a simple pneumatic input by designing the textural pattern printed on the membrane using our optimization approach,” said Dr. Nomura.
Future research could look into integrating Turing pattern designs with cutting-edge materials like shape memory or electroactive polymers, according to the research team, to develop actuators with improved dynamics.
The researchers also foresee exploring the scaling of fabrication techniques to accommodate mass production and larger actuators, possibly using approaches like 3D printing with flexible materials or automated weaving to enhance both efficiency and precision.
More information: Masato Tanaka et al, Fabric soft pneumatic actuators with programmable turing pattern textures, Scientific Reports (2024). DOI: 10.1038/s41598-024-69450-z
Journal information: Scientific Reports
Leave a Reply