
By Jet Propulsion Laboratory August 16, 2024
Collected at: https://scitechdaily.com/curiositys-wild-ride-how-the-sky-crane-changed-the-way-nasa-explores-mars/
Twelve years ago, NASA landed its six-wheeled science lab using a daring new technology that lowers the rover using a robotic jetpack.
Developed due to the size and weight of Curiosity, the sky crane allowed precise landings in scientifically valuable locations. This innovative system, initially doubted, has proven essential for missions and may be adapted for use on other celestial bodies.
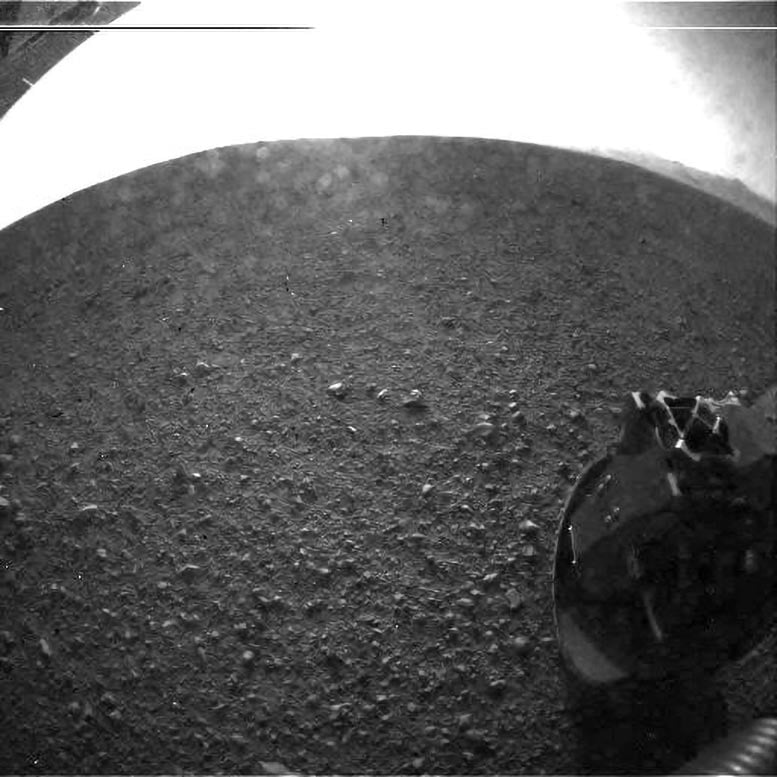
NASA’s Curiosity rover mission is celebrating a dozen years on the Red Planet, where the six-wheeled scientist continues to make big discoveries as it inches up the foothills of a Martian mountain. Just landing successfully on Mars is a feat, but the Curiosity mission went several steps further on August 5, 2012, touching down with a bold new technique: the sky crane maneuver.

Pioneering the Sky Crane Technique
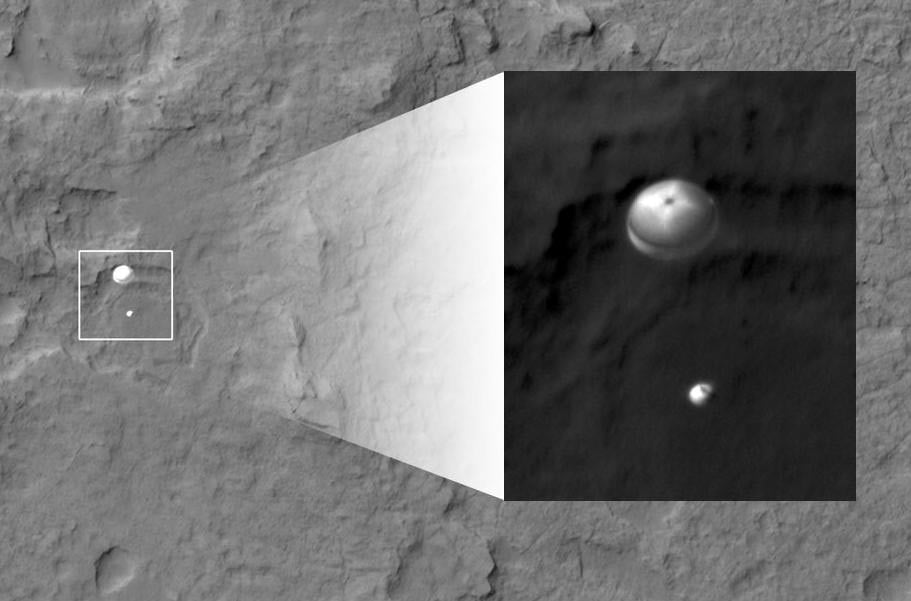
A swooping robotic jetpack delivered Curiosity to its landing area and lowered it to the surface with nylon ropes, then cut the ropes and flew off to conduct a controlled crash landing safely out of range of the rover.
Of course, all of this was out of view for Curiosity’s engineering team, which sat in mission control at NASA’s Jet Propulsion Laboratory in Southern California, waiting for seven agonizing minutes (see video below) before erupting in joy when they got the signal that the rover landed successfully.
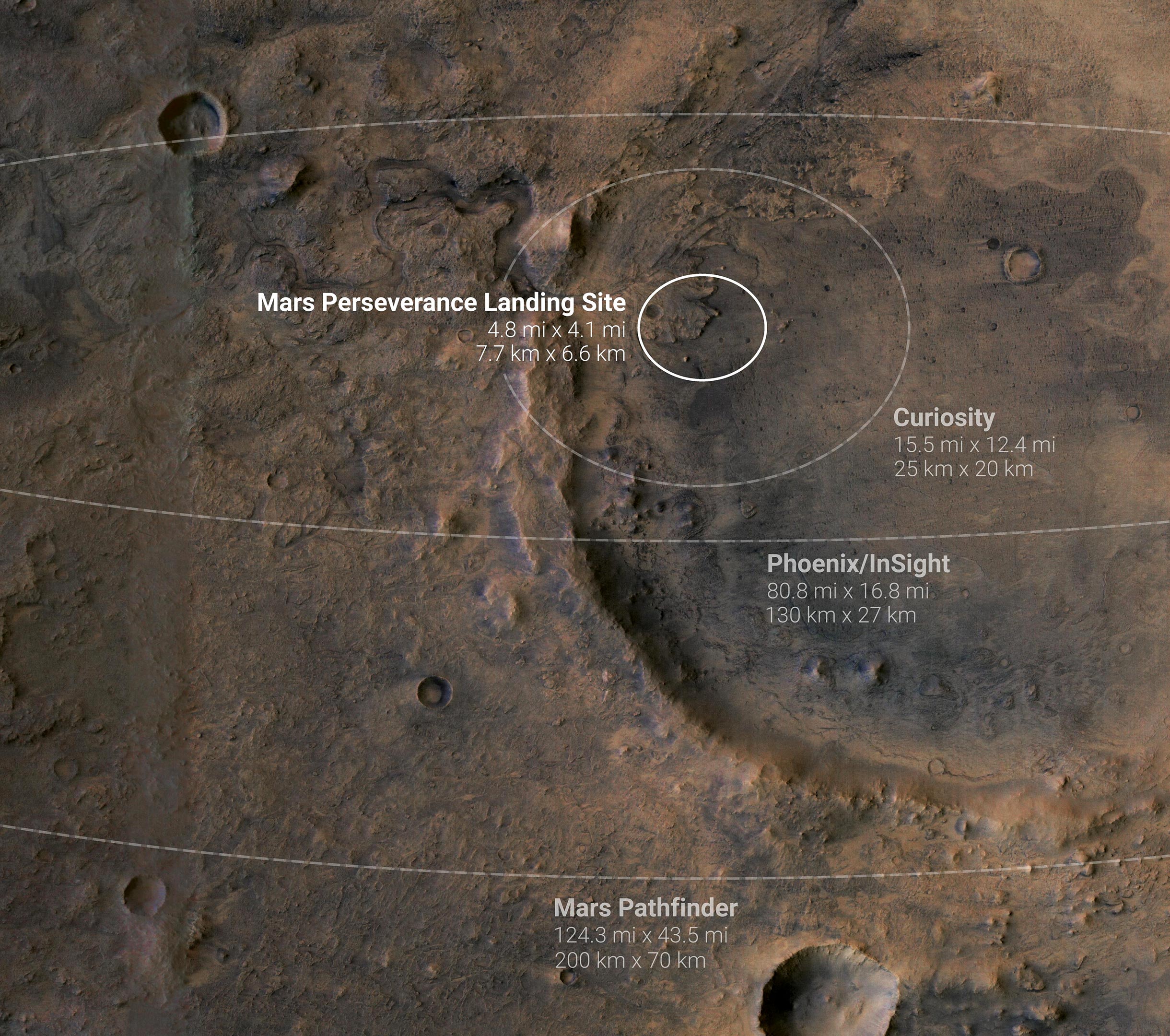
The sky crane maneuver was born of necessity: Curiosity was too big and heavy to land as its predecessors had — encased in airbags that bounced across the Martian surface. The technique also added more precision, leading to a smaller landing ellipse (see image below).
During the February 2021 landing of Perseverance, NASA’s newest Mars rover, the sky crane technology was even more precise: The addition of something called terrain relative navigation enabled the SUV-size rover to touch down safely in an ancient lake bed riddled with rocks and craters.
Evolution of a Mars Landing
JPL has been involved in NASA’s Mars landings since 1976, when the lab worked with the agency’s Langley Research Center in Hampton, Virginia, on the two stationary Viking landers, which touched down using expensive, throttled descent engines.
For the 1997 landing of the Mars Pathfinder mission, JPL proposed something new: As the lander dangled from a parachute, a cluster of giant airbags would inflate around it. Then three retrorockets halfway between the airbags and the parachute would bring the spacecraft to a halt above the surface, and the airbag-encased spacecraft would drop roughly 66 feet (20 meters) down to Mars, bouncing numerous times — sometimes as high as 50 feet (15 meters) — before coming to rest.
It worked so well that NASA used the same technique to land the Spirit and Opportunity rovers in 2004. But that time, there were only a few locations on Mars where engineers felt confident the spacecraft wouldn’t encounter a landscape feature that could puncture the airbags or send the bundle rolling uncontrollably downhill.
“We barely found three places on Mars that we could safely consider,” said JPL’s Al Chen, who had critical roles on the entry, descent, and landing teams for both Curiosity and Perseverance.
It also became clear that airbags simply weren’t feasible for a rover as big and heavy as Curiosity. If NASA wanted to land bigger spacecraft in more scientifically exciting locations, better technology was needed.
Rover on a Rope
In early 2000, engineers began playing with the concept of a “smart” landing system. New kinds of radars had become available to provide real-time velocity readings — information that could help spacecraft control their descent. A new type of engine could be used to nudge the spacecraft toward specific locations or even provide some lift, directing it away from a hazard. The sky crane maneuver was taking shape.
JPL Fellow Rob Manning worked on the initial concept in February 2000, and he remembers the reception it got when people saw that it put the jetpack above the rover rather than below it.
“People were confused by that,” he said. “They assumed propulsion would always be below you, like you see in old science fiction with a rocket touching down on a planet.”
Manning and colleagues wanted to put as much distance as possible between the ground and those thrusters. Besides stirring up debris, a lander’s thrusters could dig a hole that a rover wouldn’t be able to drive out of. And while past missions had used a lander that housed the rovers and extended a ramp for them to roll down, putting thrusters above the rover meant its wheels could touch down directly on the surface, effectively acting as landing gear and saving the extra weight of bringing along a landing platform.
But engineers were unsure how to suspend a large rover from ropes without it swinging uncontrollably. Looking at how the problem had been solved for huge cargo helicopters on Earth (called sky cranes), they realized Curiosity’s jetpack needed to be able to sense the swinging and control it.
“All of that new technology gives you a fighting chance to get to the right place on the surface,” said Chen.
Best of all, the concept could be repurposed for larger spacecraft — not only on Mars, but elsewhere in the solar system. “In the future, if you wanted a payload delivery service, you could easily use that architecture to lower to the surface of the Moon or elsewhere without ever touching the ground,” said Manning.
NASA’s Curiosity Rover
NASA’s Curiosity rover, officially known as the Mars Science Laboratory (MSL), has been exploring the Martian surface since its successful landing on August 6, 2012. Equipped with a suite of scientific instruments designed to analyze rocks, soils, and the atmosphere, Curiosity’s primary mission is to investigate the planet’s climate and geology and assess whether Mars could have ever supported microbial life. The rover’s significant achievements include the discovery of ancient water flows, complex organic molecules, and fluctuating methane levels in the Martian atmosphere, which hint at the planet’s more habitable past. Its ongoing journey through the Gale Crater continues to provide invaluable data on Mars’s environmental history and natural processes.
Leave a Reply