JUNE 1, 2024 by Ingrid Fadelli , Tech Xplore
Collected at : https://techxplore.com/news/2024-05-team-agile-multi-robot-platform.html
Teams of robots have the potential of tackling far more elaborate missions than individual robots, for instance, covering long distances faster, visiting different sites simultaneously, or monitoring larger geographical areas. Platforms that combine reliable hardware and software for multi-robot applications could help to advance research in this field, facilitating the testing of robot teams in specific real-world settings.
Researchers at the University of Cambridge recently introduced the Cambridge RoboMaster, a promising platform for multi-robot research. This platform, outlined in a paper pre-published on arXiv, includes the design of a fleet of customized Robomaster wheeled robots, along with software to simulate and train the robots on specific tasks.
“Our mission is to develop solutions for collective intelligence in multi-robot and multi-agent systems,” Amanda Prorok, Principal Investigator, told Tech Xplore. “This research incorporates methods from machine learning, planning, and control, with a wide range of applications, including automated transport, logistics, environmental monitoring, and search and rescue. To validate our research, we needed a robust and capable robotic platform.”
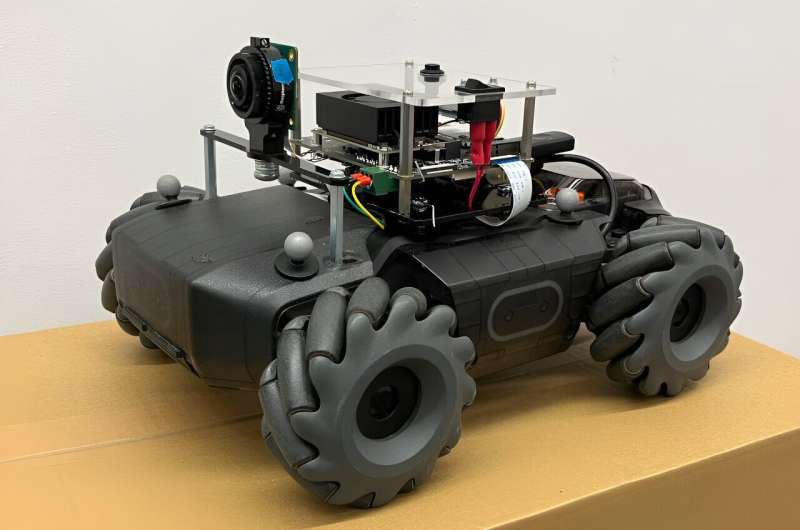
Blumenkamp and his colleagues set out to develop a multi-robot research platform that met a series of requirements, namely state-of-the-art computing power, speed, agility and durability. Ultimately, they decided to use customized versions of DJI RoboMaster S1 robots, small, wheeled robots that were originally designed for high school and university-level competitions.
“This platform provided a solid foundation that we could build upon to meet our specific needs,” Blumenkamp said. “Over the past three years, we have continued to work on this robotic platform, and we continuously iterated on and improved its capabilities. During this time, we added more capable computers, sensors, and control software and employed it in multiple projects, six in total.”
After the successful deployment of DJI RoboMaster S1 robots during various projects and competitions, the researchers decided to present them to the robotics research community. To do this, they created the platform introduced in their recent paper, which includes hardware designs, source blueprints, and software that will allow others in the field to experiment with teams of RoboMaster robots.
“The Cambridge RoboMaster is a compact and powerful robotic platform designed to advance multi-agent research,” Blumenkamp explained. “Built on the DJI RoboMaster S1, we enhanced it by replacing the main computer with a more capable one. Our custom controller pushes the platform to its physical limits, allowing it to reach a top speed of 4.5 m/s. This makes it a highly agile and effective testbed for multi-robot experiments in indoor environments.”

One of the greatest advantages of the Cambridge RoboMaster is that it offers a perfect balance between robot size and capabilities. In fact, the team’s customized DJU RoboMaster S1 robots overcome the limitations of both smaller robots, which often have scarce computing power, and larger robots, which are generally expensive and too big to be deployed indoors.
“Our platform includes a control stack for full on-board autonomy, and peer-to-peer communication, and can run multi-agent reinforcement learning policies directly from our simulation framework without additional training,” Blumenkamp said.
“Moreover, the Cambridge RoboMaster is cost-effective at around $700, making it accessible for researchers. Its combination of affordability, advanced capabilities, and versatility makes it an ideal tool for a wide range of research demonstrations and practical applications in multi-agent systems.”
Notably, Cambridge RoboMaster robots are both agile and cost-effective, making them easy to fabricate and test in academic and research settings. Universities and robotics labs worldwide could thus rapidly integrate the platform into their experimental work, for instance using it to test algorithms for the planning of multi-robot missions.
The researchers have already tested their robots in various tests, which demonstrated their power-efficiency and versatility. For instance, the robots were found to effectively navigate both indoor and outdoor environments on smooth terrains.
“While we do not intend for this platform to be directly used in real-world settings, it serves as an ideal proxy, and a research tool that allows for testing algorithms applicable in multi-agent navigation,” Blumenkamp said. “Such scenarios are relevant for real-world domains including warehouse automation and logistics.”
The Cambridge RobotMaster has so far proved to be a highly versatile, reliable and accessible testbed for multi-robot research. The hardware, software and simulation tools necessary to start experimenting with the platform, published on GitHub, could soon be used by research groups worldwide to test algorithms for various multi-robot applications, including automated transport logistics, environmental monitoring and search and rescue missions.
“For future research, we have exciting plans to use this platform in a variety of projects. Right now, we’re focusing on improving on-board sensing, decentralized communication, and control,” Blumenkamp added.
“We’re also looking at how this platform can serve as a bridge for deploying our research to drones. By continuing to enhance and expand what this platform can do, we aim to push the limits of multi-robot and multi-agent systems research. Maybe, one day we will see these robots playing soccer.”
More information: Jan Blumenkamp et al, The Cambridge RoboMaster: An Agile Multi-Robot Research Platform, arXiv (2024). DOI: 10.48550/arxiv.2405.02198
Journal information: arXiv
Leave a Reply